Bayesovské Adaptivní Distribuované Dynamické Rozhodování
![]()
![]()
![]()
|
|
|
Bayesovské Adaptivní Distribuované Dynamické Rozhodování |
|
Poslední aktualizace: 28.1.2008 © Thritton |
 |
Galerie II.Podpora rozhodování s jedním účastníkemAkademický návrh: princip | vliv parametrů cílové směsi Porovnání na příkladě: systém | výstupy návrhů | dilema průmyslového typu návrhu
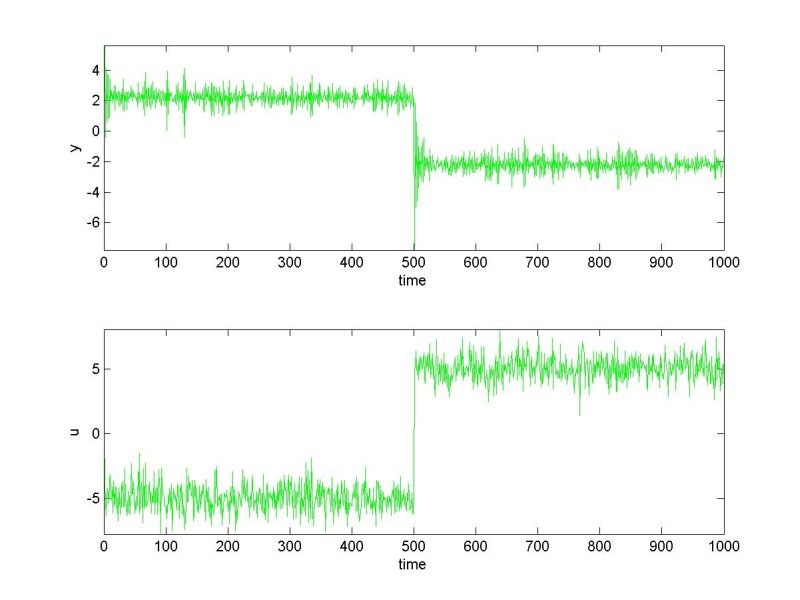
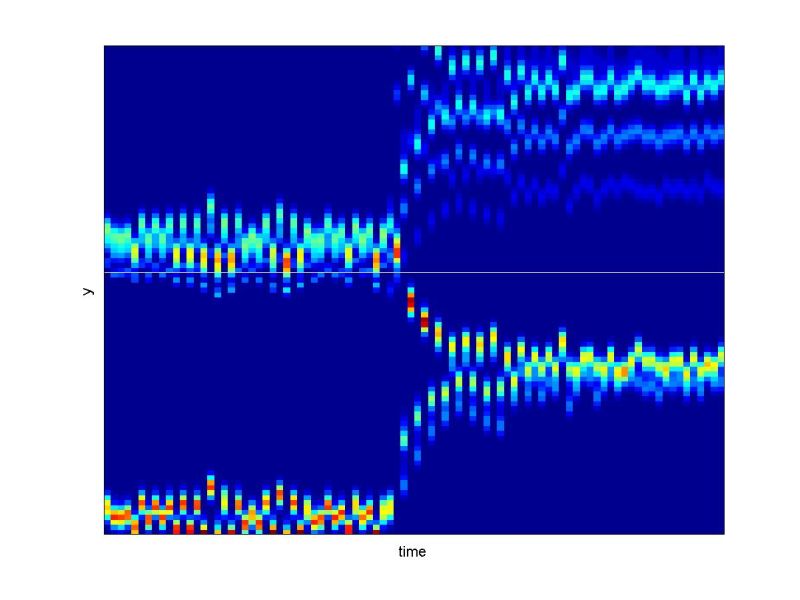
Porovnání metod na jednoduchém příkladěMějme systém charakterizovaný rovnicemiyk = -0.8 yk-1 + 0.2 u k-1 + c1 + 0.3 ek uk = c2 + ek , kde y, u jsou výstup a vstup systému, k značí diskrétní čas a ek je výstup z generátoru šumu s normálním rozložením N(0,1). Pro k = 1, …, 500 platí c1 = 5, c2 = -5, pro k = 501, …, 1000 platí c1 = -5, c2 = 5, viz. následující obrázek:
Dynamická směs odhadnutá z dat [y u] je složena z 8 komponent, které se snaží kompromisně modelovat oba módy systému. (V deterministickém případě by komponenty byly pouze dvě). Je zadán cíl y* = 2.5, u* = 0, tzn. udržet výstup systému blízko střední hodnoty 1. módu při minimálním řízení. Hodnoty kovariancí pro cílovou směs jsou v každém kroku odvozovány od komponenty, která leží nejblíže aktuálním datům. Následující obrázek srovnává výsledky použití akademického, průmyslového a simultánního návrhu.
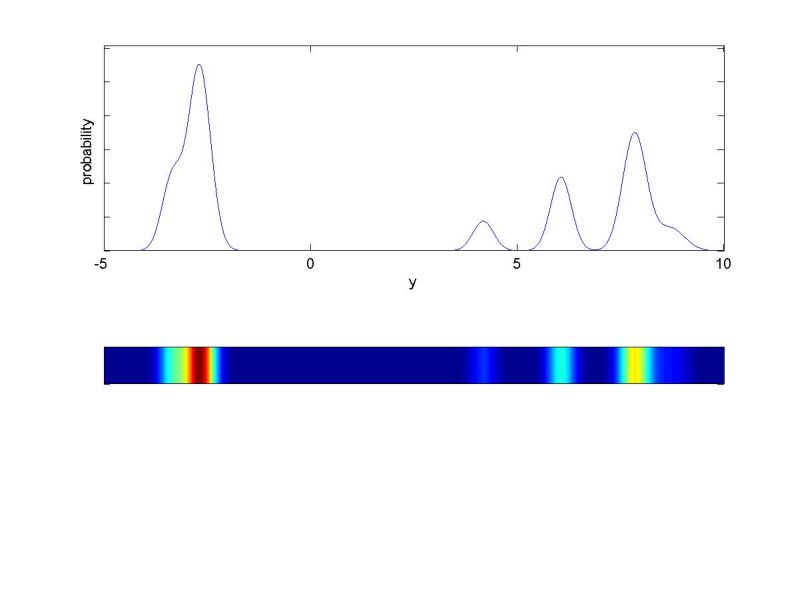
Akademický návrh (modře) pouze mění váhy komponent směsi – hodnota u zde tedy není skutečné řízení, ale vážená střední hodnota použitých komponent. Pro 1. mód odpovídá očekávaný výstup původním datům (zeleně), pro druhý mód je výstup značně vzdálen požadavku, i když méně, než původní data. Průmyslový návrh (tyrkysově) splňuje požadavek na minimální hodnoty řízení, ale výstup je pro 1. mód neuspokojivý. Je to dáno tím, že regulátor uvažuje všechny komponenty s původními vahami a jím doporučovaná hodnota je váženým průměrem přes všechny komponenty. “Dilema” návrhu je znázorněno na obrázku, který barvami znázorňuje pravděpodobnostní rozložení směsi pro výstup v jednotlivých krocích.
Simultánní návrh (červeně) poskytuje výsledky, které se nejvíce blíží zadanému cíli – k výpočtu doporučených hodnot řízení jsou použity komponenty s přepočtenými parametry.
Je třeba poznamenat, že uvažovaný příklad slouží jako ilustrace přístupu, jehož potenciál se projeví zejména pro reálné mnohorozměrové a multimodální systémy, jejichž model není znám. Zde by se snadno dosáhlo požadovaného cíle s použitím “normálního” optimálního regulátoru. |