Bayesian Adaptive Distributed Dynamic Decision Making
![]()
![]()
![]()
|
|
|
Bayesian Adaptive Distributed Dynamic Decision Making |
|
Last modification: 28.1.2008 © Thritton |
 |
Gallery II.Single participant decision supportAcademic design: the principle | parameters of target mixture Comparative example: system | results of designs | dilemma of industrial design
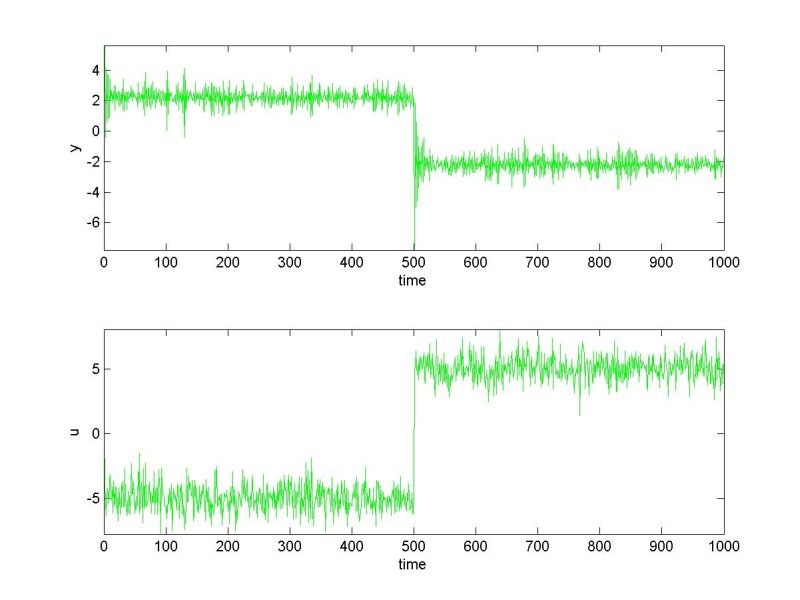
A simple comparative exampleLet the system be defined by equationsyk = -0.8 yk-1 + 0.2 u k-1 + c1 + 0.3 ek uk = c2 + ek , where y, u are system output and input respectively, k denotes discrete time and ek is output from the noise generator with normal distribution N(0,1). It holds c1 = 5, c2 = -5 for k = 1, …, 500, and c1 = -5, c2 = 5 for k = 501, …, 1000 as shown on the following plot:
A dynamic mixture identified from data [y u] is composed by 8 components which attempt to model both modes of the system compromisingly. (There would be just 2 components for a deterministic system). The given target values for y* = 2.5 and u* = 0, represent the requirement to keep the output close to the mean of the 1st mode with the minimal control effort. Variances for the target mixture are derived for each k from a component of the identified mixture which is the closest to actual data. Following figure compares results of academic, industrial and simultaneous designs.
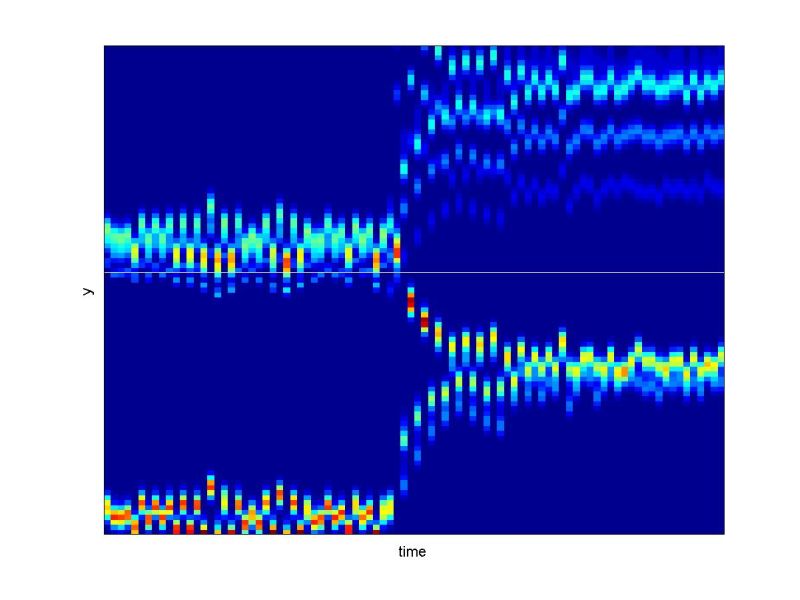
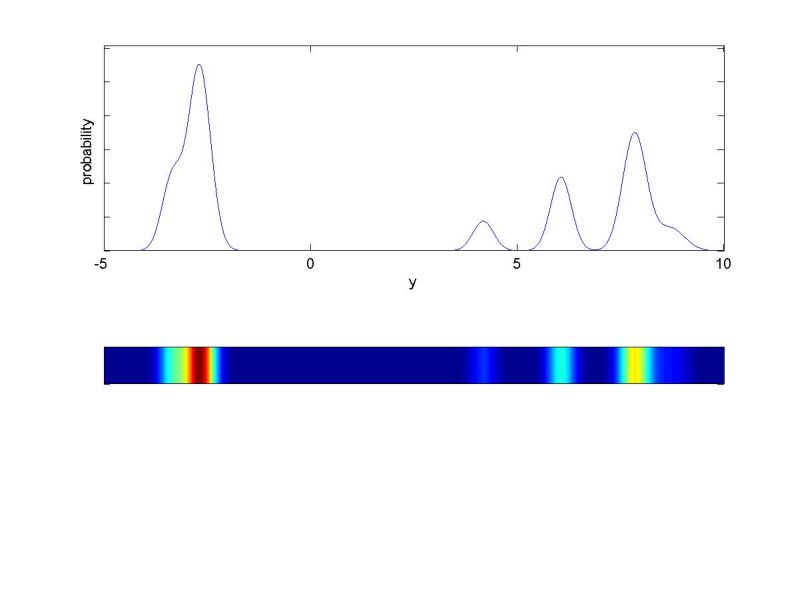
Academic design(blue) just changes components weights – value of u does not mean an ordinary control setpoint here but represents the weighted mean of used components. The result corresponds to the original data (green) for the 1st mode while the expected output y is far from the target for the 2nd mode although closer than the original data. Industrial design (cyan) meets the requirement for minimal values of control but expected output y for the 1st mode is unsatisfactory. It is given by engaging all of the components with original weights. „Dilemma“ of the design is depicted on the following figure where probability distribution is mapped into colors for particular steps of k.
Simultaneous design (red) provides the best result for this case. Components with re-calculated weights are used for evaluation of recommendations of the control setpoints.
It is appropriate to mention that the considered example just illustrates the approach the potential of which can be exploited for complex multidimensional and multimodal systems. For this system the target could be easily reached by the “normal” optimal control design. |